|
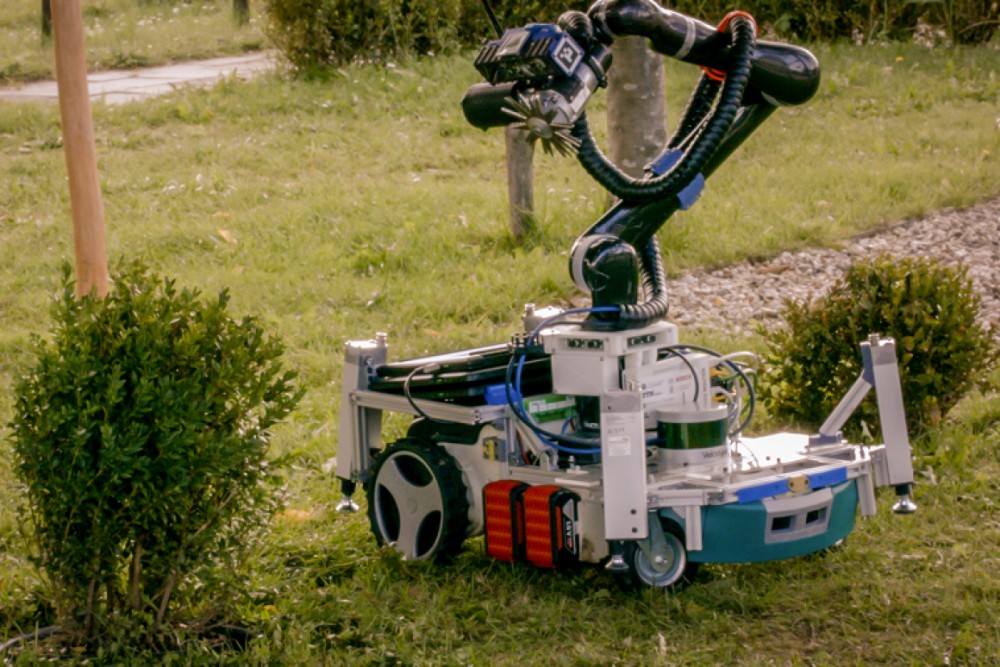
近日,由英国爱丁堡大学领导的国际研究人员小组开发出了Trimbot园丁机器人来完成这项工作。它被称为Trimbot,不仅可以修剪草坪,还可以修剪玫瑰和修剪灌木丛。
花园是非常人性化的环境,一方面需要应对各种路线带来的导航挑战,另一方面玫瑰花丛需要精确、细腻的修剪,而非刀砍。
Trimbot是基于Bosch机器人割草机升级的机器人,Trimbot可以帮助维护公共空间,充当机器人农场主,并帮助老年人和残疾人照料自己的花园。Trimbot配置了3D映射的立体相机以及带有各种工具的灵活机械臂。
在开始工作之前,编程人员先以花园的粗略地图对Trimbot编程,然后计算机视觉系统会对其进行优化以帮助机器人导航。在计算机的大脑中,有很多算法可以告诉它,例如理想的灌木看起来像什么,可以帮助修剪或通过在要切割的植物茎上定位确切的位置来修剪玫瑰。
信息学学院的鲍勃·费希尔(Bob Fisher)教授表示,能让机器人在真实的花园中工作是一项重大的工程技术成就,“我们八个合作伙伴团队开发了新的机器人技术和3D计算机视觉技术,使其能够在户外不断变化的照明和环境的条件下工作。”
随着大数据及技术支撑型农业的兴起,越来越多的农业机器人开始出现在大众的视野中。拥有先进人工智能(AI)技术和内置分析系统的机器人正被广泛应用于各种场合。
园丁机器人属于农业机器人的一个细分领域,美国麻省理工学院也曾设计农业应用方面的机器人,可以完成检测植物生长过程中的生长状态参数同时完成果实采摘的任务,可在判断浆果成熟与否之后对已熟浆果进行采摘。
原文地址:http://www.imrobotic.com/news/detail/20561
| 

 发表于 2019-11-12 17:15
发表于 2019-11-12 17:15