|
手工操作是“对人类而言毫不费力,但对机器人而言却极为困难的技能”,对于机器人而言,如何利用技术开发来使机器人能以更“类人”的方式来解决这类问题是目前很多科研实验室正在研究的问题。人类需要多年的实践才能弄清楚如何有效地进行手部操纵,但是机器人没有那么多时间。机器人通过实践和经验学习仍然是完成诸如此类的复杂任务的方法,近期科研人员们找到了一种方法,以更快,更高效地学习,而不是重复性地仅仅给机器人手一遍又一遍地进行操作,直到它了解有效的方法和无效的方法为止。
近日,来自 OpenAI 的研究者训练了一对神经网络,利用一只类人机械手来玩转魔方。自 2017 年 5 月以来,OpenAI 的研究者一直在尝试训练类人机械手来解决玩魔方问题。2017 年 7 月,他们在模拟环境下实现了机械手玩魔方。但截至 2018 年 7 月,研究者只能实现玩简单魔方。现在,他们终于实现了机械手玩魔方的目标。
单手玩魔方对于人类来说都很困难。所以,OpenAI 的技术还不是足够完善,目前,OpenAI 的技术可以让机器人解决 60% 的魔方情况,在最困难的魔方上只能解决 20%。
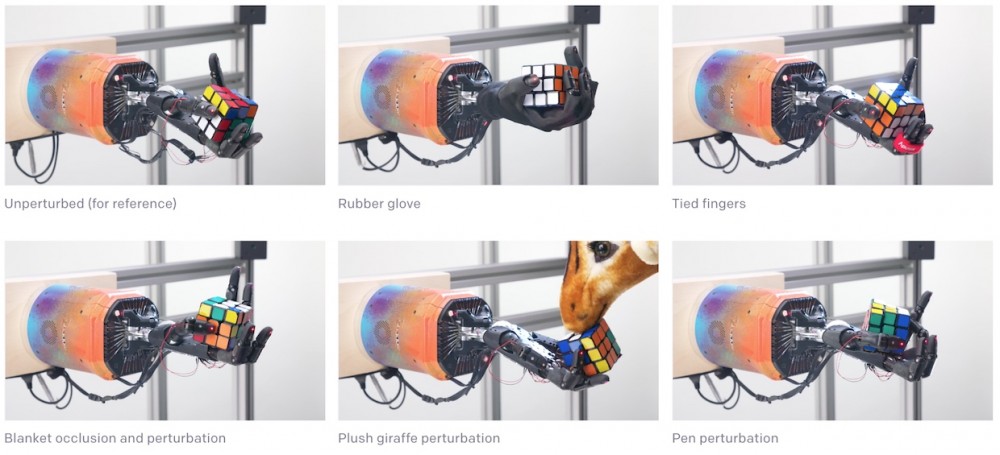
在机械手玩魔方的过程中,研究者还对其施加了各式各样的干扰,如戴橡胶手套、绑住食指和中指、蒙上一块布、「假长颈鹿」干扰和用笔戳等。值得欣慰的是,OpenAI 的机械手在各种干扰下依然不为所动,淡定地玩「自己的」魔方。
OpenAI 的研究者考虑了两项都使用影子灵巧手指(Shadow Dexterous Hand)的不同任务:魔方块的重定向和完成魔方。
1,魔方块重定向
魔方块重定向任务是为了旋转方块到期望的目标方向上。如果一个方块的旋转弧度与目标方向保持在 0.4 之内,则认为该方块旋转到了正确的方向,然后也就生成一个新的随机目标(即另一个方块也开始旋转)。
2,完成魔方
研究者提出利用相同的影子灵巧手指来解决魔方任务。简言之,魔方是一种内部具有 6 种自由度的益智游戏,包含 26 个通过接头和弹簧系统相连的方块。每个方块有 6 个面,可以自由旋转,从而带动整个魔方转动。如果魔方的 6 个面都成为一种颜色,则认为魔方任务完成。
研究人员指出,他们所开发的方法是通用的,可以应用于训练现实世界中的机器人来执行模拟任务。只要您的模拟足够多样化,根本就不需要任何实际的培训就能依靠此类模拟技术完成机械手模拟任务。这项研究的长期目标是为了减少大多数机器人只拥有单一,固定化的应用。如果能很好的解决这类问题,那么不久的将来,机器人的应用多样化将比现在更广,且性价比也将更高。
原文地址:http://www.imrobotic.com/news/detail/19505
| 

 发表于 2019-10-29 13:33
发表于 2019-10-29 13:33