|
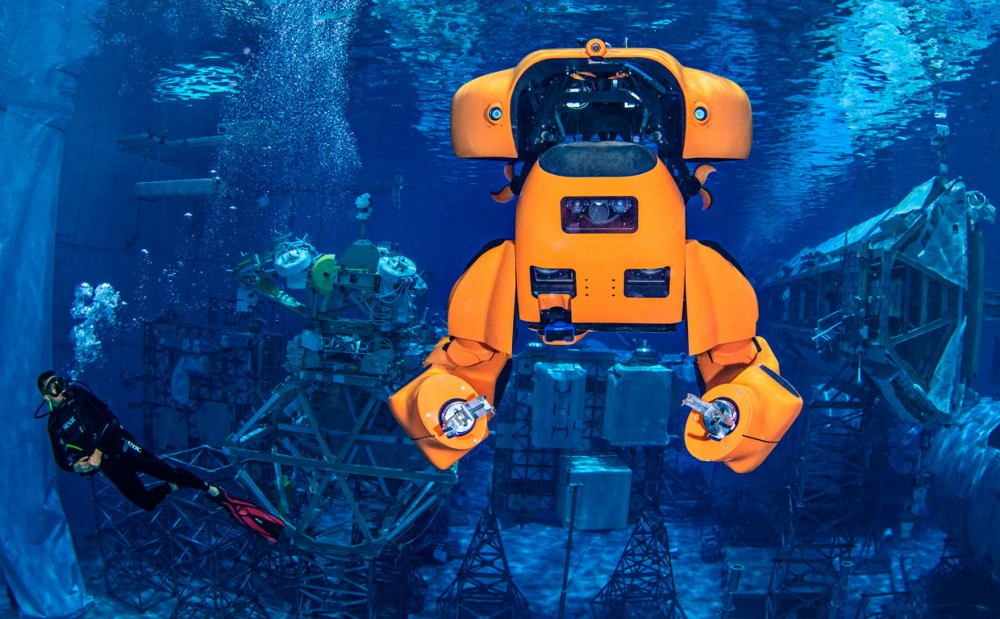
在休斯顿某处一个巨大的游泳池内,美国宇航局用它来训练宇航员在零重力环境下的各种反应和操作。其中有一个看起来尤为可爱的橙色机器人,它正陪伴着宇航员们,并与他们一起“训练”。
机器人Aquanaut在美国宇航局中性浮力实验室的测试中漂浮在水下
这个泛着明亮颜色的机器人叫做Aquanaut,外表看起来像一艘微型潜艇。它是由美国公司Houston Mechatronics研发的一款可变形”水下潜艇,可在潜艇与人形机器人模式间进行自由转换。
Aquanaut可在“潜艇”模式下下潜到水下数百英里,亦可“变形”为可进行精准操作的机器人。这个重达1050公斤的庞然大物的动力来自两个后推进器。
这种新型潜艇摆脱了对母舰和操作人员的需要,同时又具有强大的态势感知和修改任务的能力。 Aquanaut主要用于维修海底石油和天然气装置。拥有和运营这种基础设施的公司会花费大量资金来检查和维护它。因为该机器人能帮助人类在极端工作环境下完成一些危险系数较高的任务。将机器人置于偏远地区,让他们在严峻的数据环境中做有用的工作,最能解决这个大问题:离岸工作。
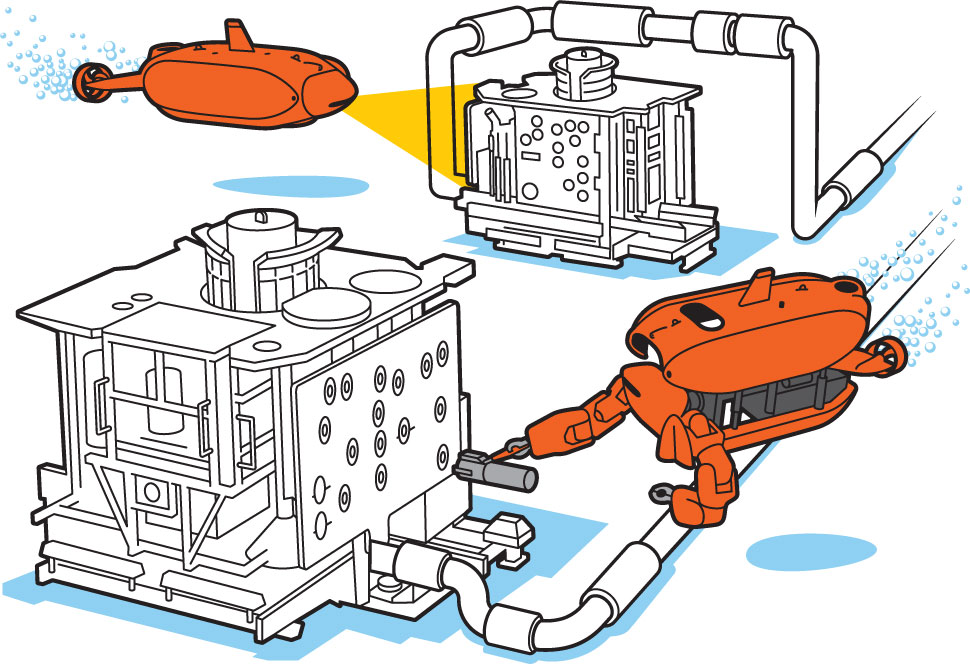
Aquatic Handyman:在潜艇模式下,Aquanaut调查并检查部署在海底的石油和天然气设备。在人形模式中,机器人使用其手臂抓住专用工具并操作控制碳氢化合物流向地面的阀门。
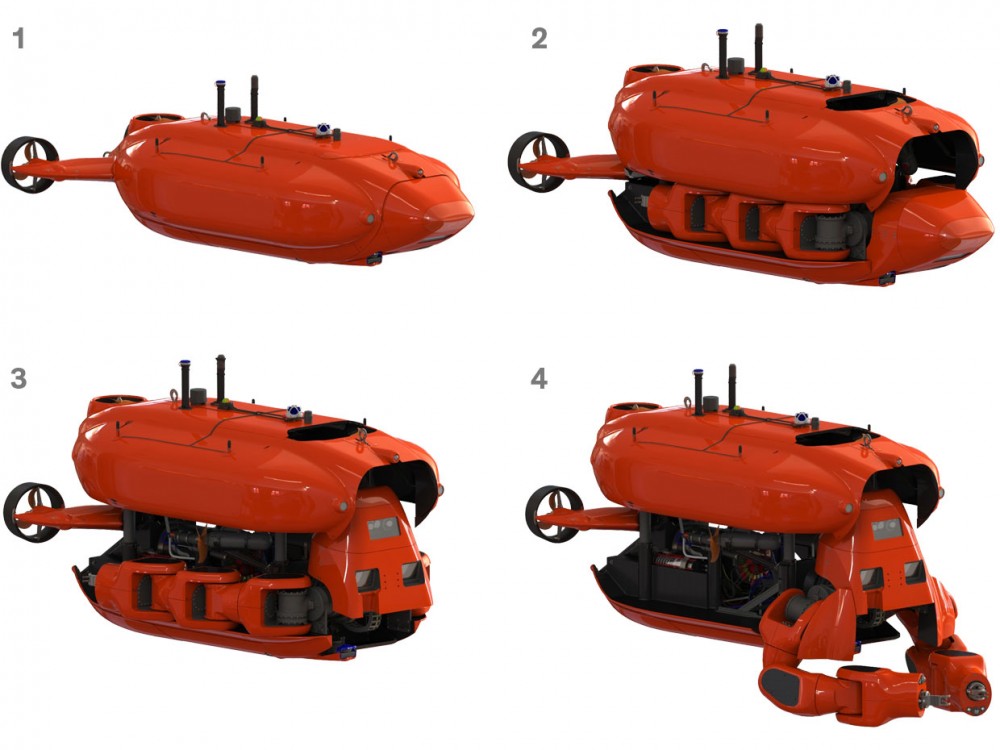
Aquanaut在无人水下航行器中是独一无二的,因为它可以从专为长途巡航设计的灵活潜艇转变为能够执行复杂操作任务的半人形机器人。以下是转型的发生方式。
1,Aquanaut以简化的潜艇模式前往海底工作场所。
2,一旦机器人到达现场,其船体的顶部就会上升,暴露出两个巨大的手臂和一个楔形的头部。
3,头部携带立体摄像头,3D传感器和声纳系统,旋转到位。
4,机器人展开其强大的手臂,配备力传感器和爪式夹钳。
自从2014年启动HMI以来,Radford和其他联合创始人Matt Ondler和Reg Berka已经获得了超过2300万美元的投资。现在,经过无数次设计迭代,Aquanaut终于有了目前的最新版本。
原文地址:http://www.imrobotic.com/news/detail/13102
| 

 发表于 2019-10-22 16:03
发表于 2019-10-22 16:03