嗨,各位喵粉们大家好~最近有不少的喵星粉用户对于RosBot主控板怎样才能更新到最新固件的事情很是头大,对于初学编程者来说,感觉很难,不知如何上手烧录,今天喵星人在这里快速的为各位讲解一下,跟着喵星人走,学习编程不迷路~记得点点上方蓝色字体关注哦~
RosBot最新固件更新方法:
首先在打开KittenBlock软件之后,看看有没有更新到软件的最新版本~如果发现有新版本,请及时更新哦~
温馨提示:如果有学习Scratch3.0以及想要体验Python的喵粉,可添加QQ群:568084773,进群内群公告里即可获取Scratch3.0链接~
RosBot最新固件烧录指南:
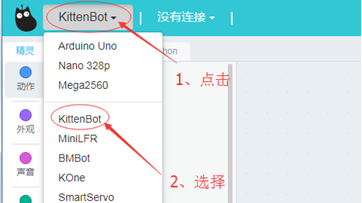
软件更新以后,接着就到了今天的主题RosBot主控板的烧录了;在已经打开的KittenBlock软件中,先使用USB数据线将主控连接到电脑端, 然后选“KittenBot”
接着选择COM串口;
连接到串口以后,接着就到了上传了~
上传之后,会在最下方显示一个最新版本号,表示上传成功啦~
是不是很快就上手了呢?学会的朋友们快来试试吧~ 也欢迎广大编程爱好者加入3.0微信群,扫码加关注,喵星人带您进去微信Scratch3.0体验群~
| 

 发表于 2017-9-25 14:04
发表于 2017-9-25 14:04
