|
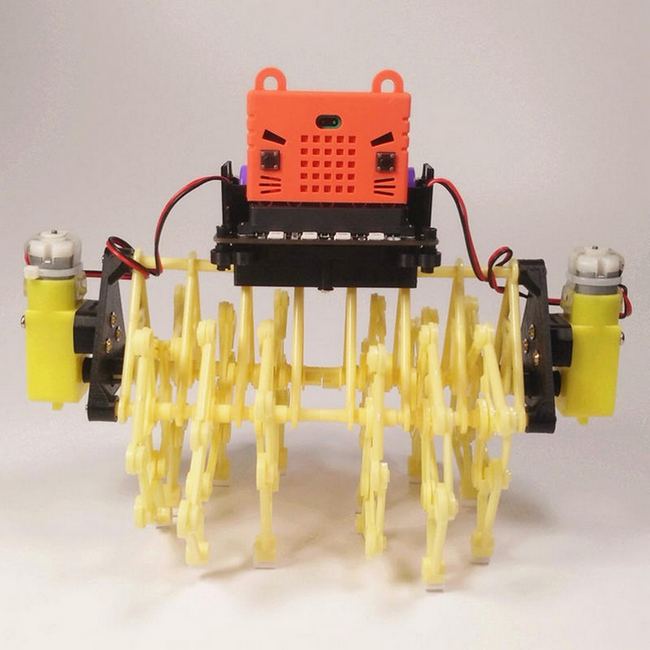
1. 概述 这个项目是使用3d打印软件设计并打印出多仿生兽的连接件,组装完成后利用microbit无线通讯技术控制仿生兽进行一系列移动。 2. 项目耗材清单硬件及耗材 - microbit*1
- robotbit*1
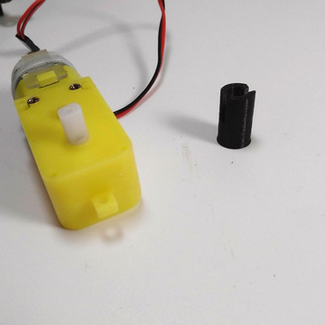
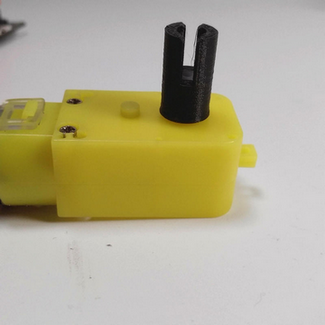
- TT电机*2
- 18650锂电池*1
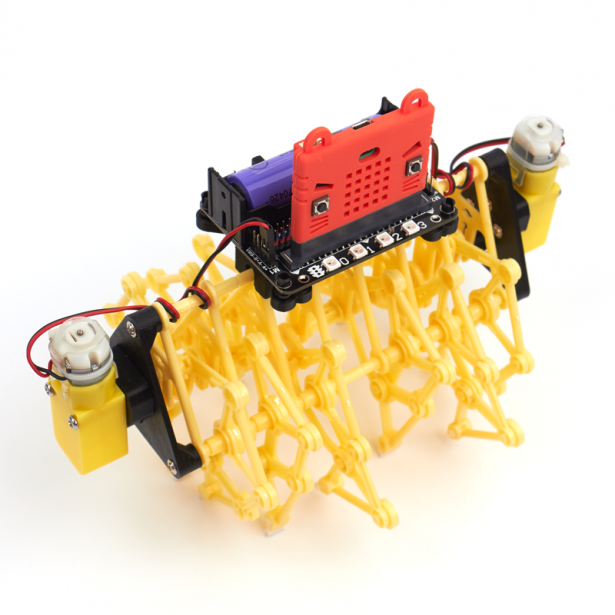
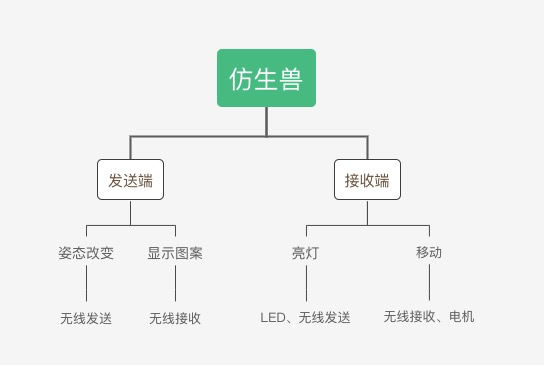
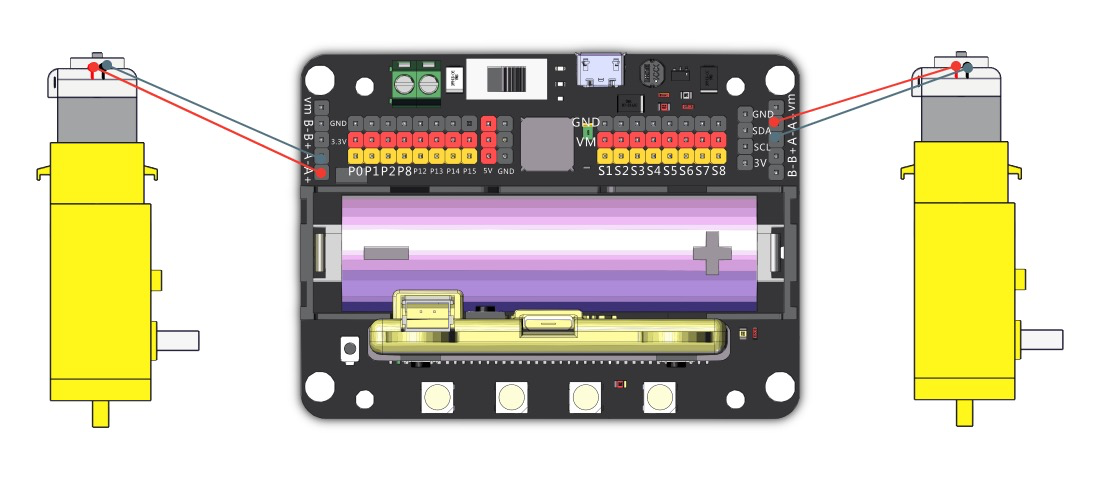
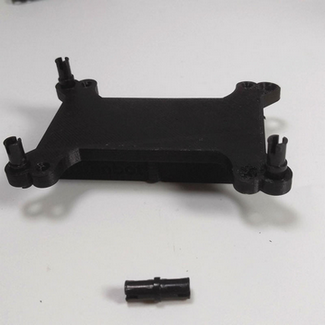
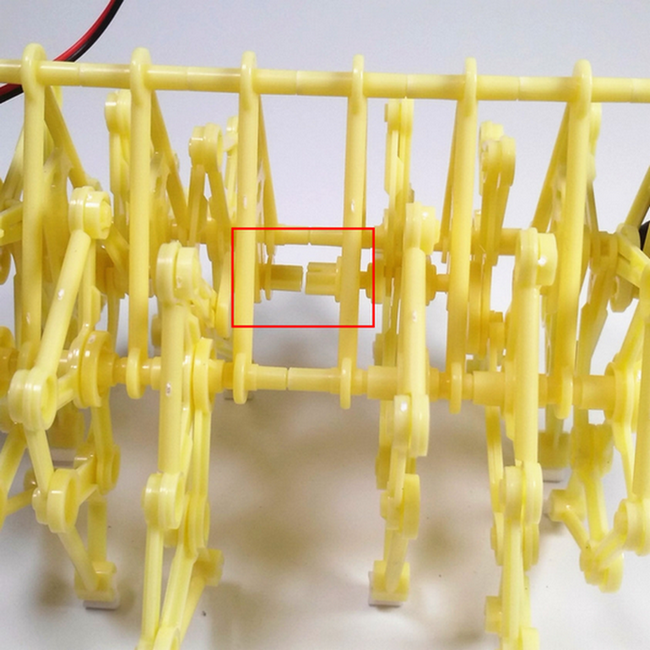
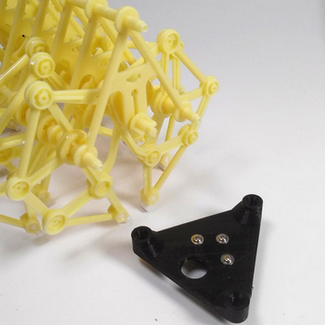
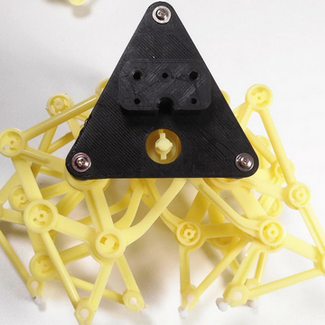
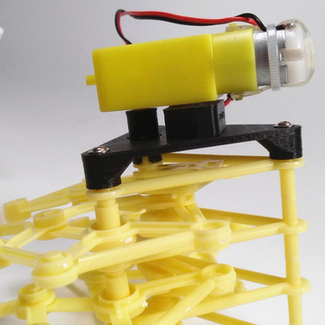
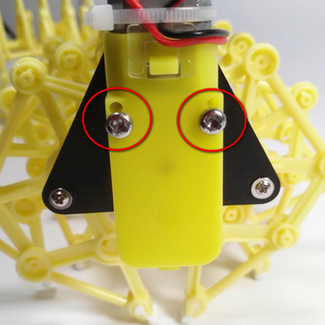
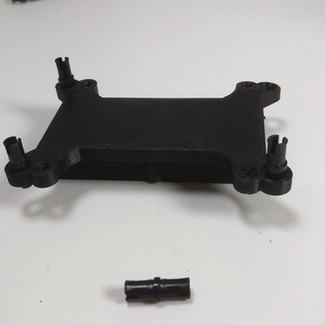
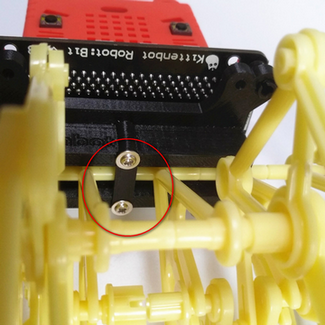
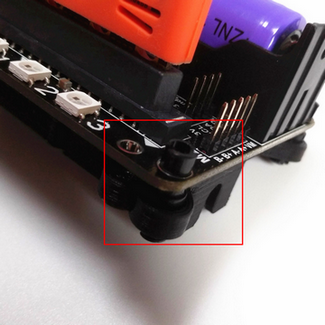
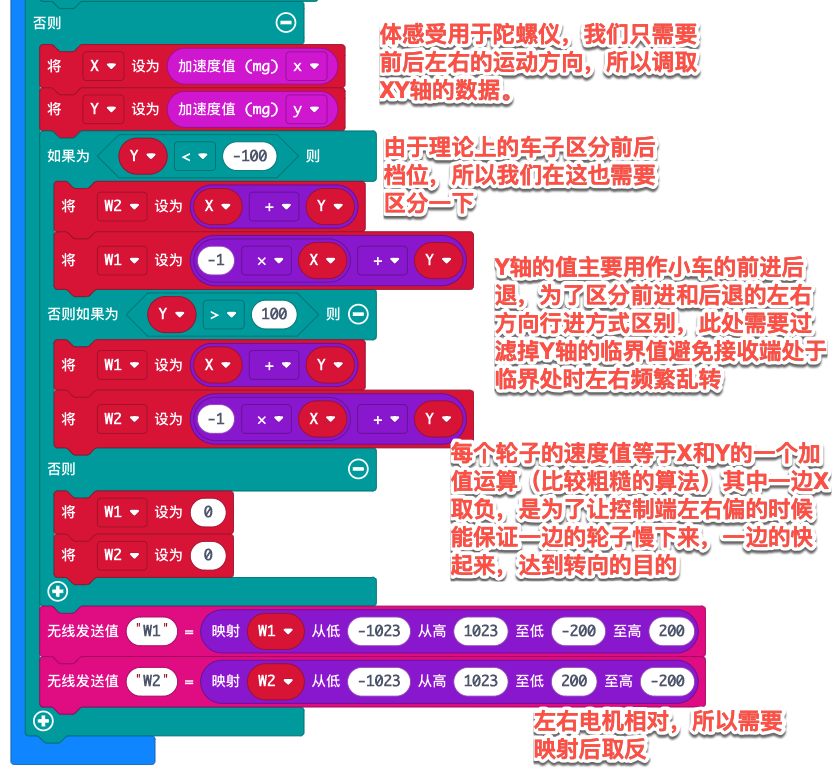
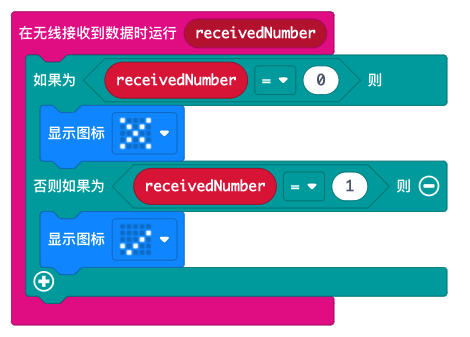
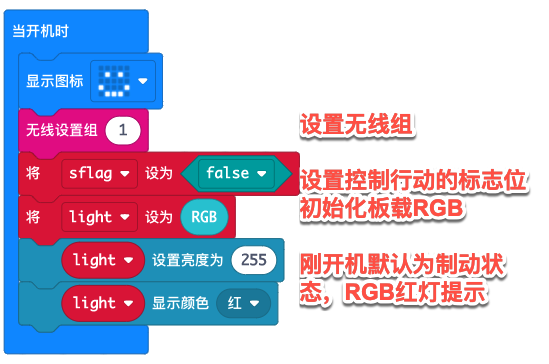
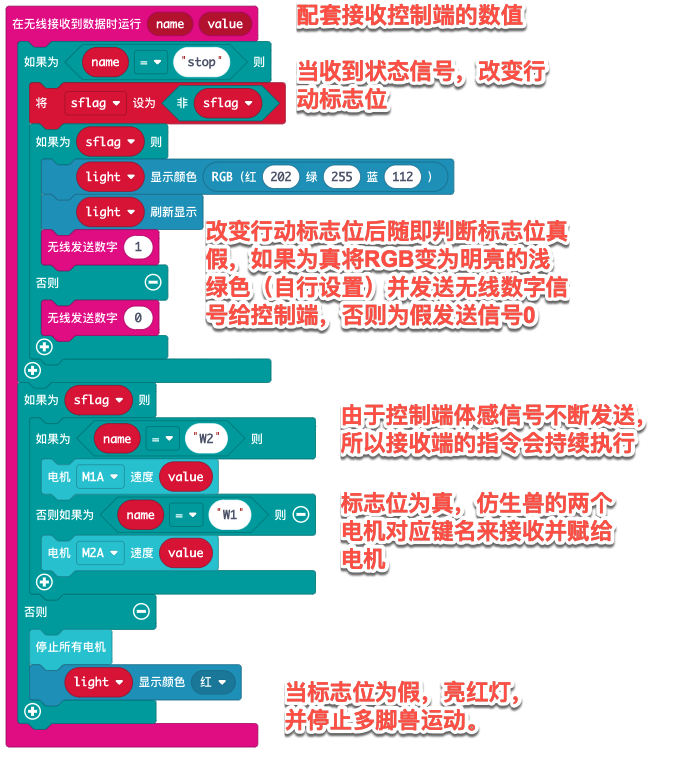
软件及服务 制作工具 3. 项目故事无意间在网上看到荷兰艺术家西奥-詹森打造的海滩仿生兽,不由感叹这个作品设计技艺着实高超,而且这个作品完全是靠风驱动仿生兽。于是我就忍不住想要自己改造一下,做一个无线控制的仿生兽。所以我打印了几个3d连接件,可以直接安装到仿生兽的身上,用来固定microbit及其他硬件设备。下面给大家简单介绍下制作步骤。 4. 制作步骤步骤一:功能分析仿生兽程序分发送端与接收端,通过无线通讯进行数据互通。 步骤二:电路连接两个电机接在(M1A+,A-),(M2A+,A-)接口(注意颜色线序)。 步骤三:流程分析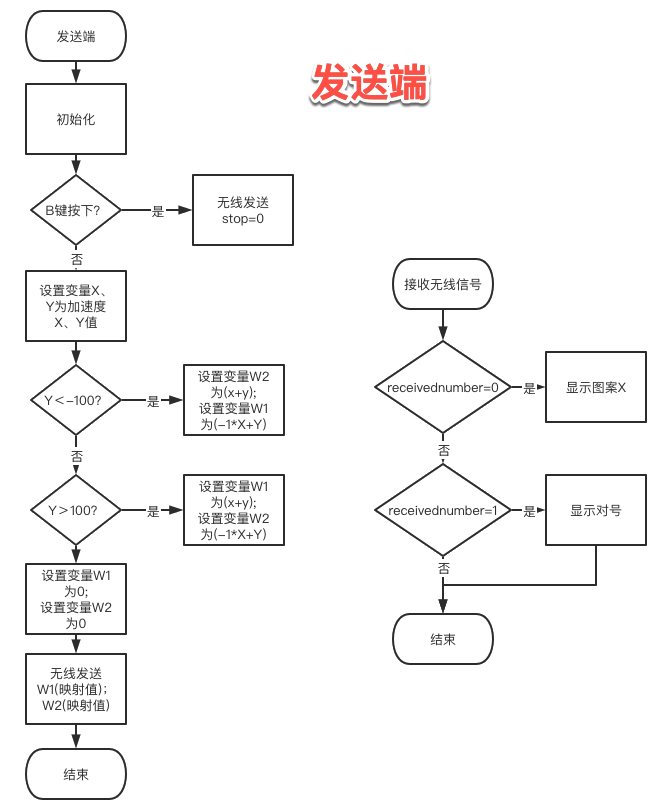 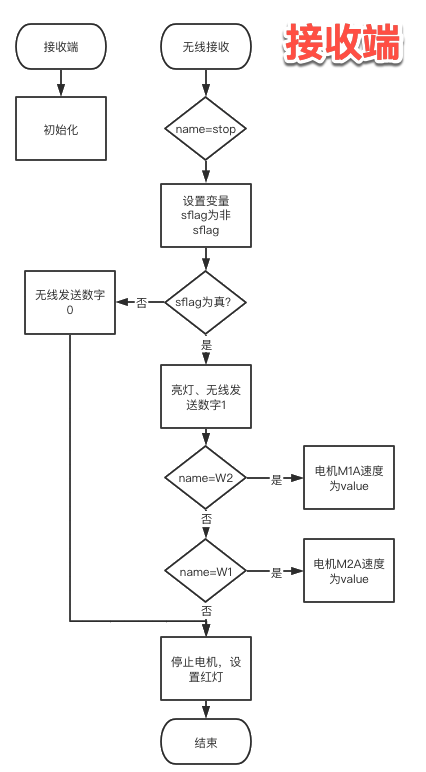 步骤四:结构设计连接件设计) 步骤四:结构设计连接件设计)连接件采用3D打印设计的,这里直接提供给大家(附录中),大家可以自己使用3D打印机制作出来。当然如果自己本身会建模,也可以自己动手DIY一下。 robotbit底座:用来固定robotbit到仿生兽身上。 电机连接件:用来固定电机在仿生兽的左右两侧。 组装)脚部组装:脚部零件是在淘宝上购买的,在淘宝上搜“仿生兽”即可,按上面的说明书组装好。 将组装好的打印件与机械支架组合并固定 给TT电机安装插销 TT电机固定到支架上 LEGO插销固定到robotbit支撑台的平面一侧,支撑台卡主机械支架中心并固定 Robotbit和支撑台的组装如图 完成图 步骤五:程序编写基础程序)通过无线发送数字,来控制仿生兽前进和停止。 进阶程序)控制端程序 首先进行初始化设置。 设置一个停止按钮B,长按B键1秒则发送stop=0。 设置为陀螺仪XY轴数据来控制仿生兽。 接收仿生兽发回的无线数据,以此判断仿生兽是否接收到无线信息。 接收端程序 初始化设置 无线接收程序 5. 后记仿生兽项目看起来很难,实际上吧问题拆开解决就容易多了。大家可以自己去动手试一试。 附录参考资料: | 

 发表于 2021-4-13 14:58
发表于 2021-4-13 14:58






 楼主
楼主