本帖最后由 dfrobot 于 2019-11-18 15:52 编辑
micro:bit造物粒子(基于Mind+)07— 自动门 麦克的故事 科技发展的很快,麦克好奇的问小米老师,每次经过图书馆的时候,门会自动的打开,这是为什么的? 是门口会有人专门守着,会帮每个人开门么?小米老师说:没有人专门守着,门很神奇的,它会监测到有人经过,自动的把门打开。
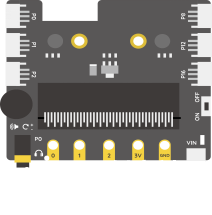
所需元件 1× micro:bit主控板 1× micro:bit扩展板 1×按钮模块
1× 运动传感器模块
又称红外热释电运动传感器,能检测运动的人或动物身上发出的红外线,一定范围内,有人或动物,可以传递信号,就像按钮被按下传递信号一样。
1× 舵机(伺服机构)
1× MicroUSB 连接线
任务一:按钮控制舵机(伺服机构)
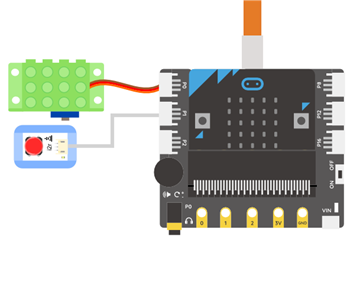
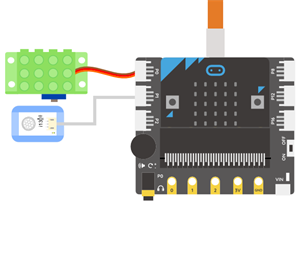
实现功能 当按下按钮的时候,舵机(伺服机构)转动0°,按钮没有被按下时,舵机旋转100°。 硬件连接 把舵机接到扩展板P0号接口上; 把按钮模块(运动传感器)接到扩展板P1号接口上。 编写程序 STEP1:增加控制器模块。 控制舵机的运行需要增加一个控制舵机的指令模块,调用的流程:扩展--执行器--舵机模块,点击舵机模块后再返回到编程界面即可。
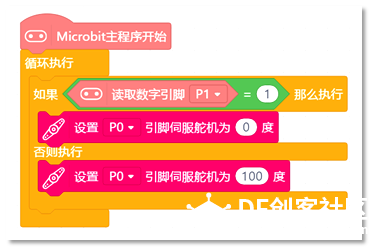
此时,编程界面会增加执行器的模块,点开执行器的模块可以控制舵机,通过设置P0号引脚可以控制舵机(伺服机构)的值。 STEP2:如果按钮按下,实现舵机转动0°;否则舵机旋转100°。
需要用到的指令为:“如果--否则”。
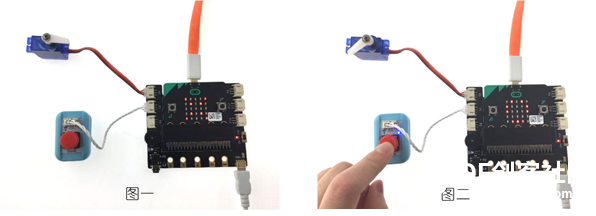
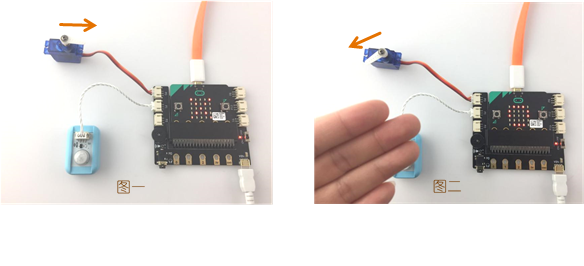
STEP3:最终程序。 注意:由于舵机(伺服机构)耗电量大,需要外接电源。 实验效果
图一:按钮没有按下;图二:按钮被按下
任务二:运动传感器控制舵机(伺服机构)
实现功能 当运动传感器检测到有人经过时,舵机转动0°,否则,舵机旋转100°。 硬件连接
将任务一按钮控制舵机中的硬件按钮模块换成运动传感器模块。
编写程序
STEP1:数字读取引脚读取P0引脚连接的运动传感器的数字信号数值。 STEP2:当运动传感器检测到有人经过时,实现舵机转动0°;否则,舵机旋转100°。 需要用到的指令为:如果--否则。如下图: STEP3:最终程序。 实验效果 图一:无人时;图二:有人时 注意:由于舵机(伺服机构)耗电量大,需要外接电源。
Mind+最早是由DFRobot公司于2013年推出的图形化编程软件,能够让不懂编程的艺术家们通过几分钟的学习即可控制Arduino开源硬件,从而拓宽一些新的思维方式。
| 

 发表于 2019-11-18 15:00
发表于 2019-11-18 15:00