|
蜂鸟是地球上最灵活的飞行员之一。它们的速度和敏捷性是惊人的,由控制翅膀的复杂肌肉驱动。对于机器人来说,这是一个难以模仿的系统,一般来说,我们看到的小型有翼机器人依赖于控制方面的妥协,以便能够使用扑翼进行飞行。
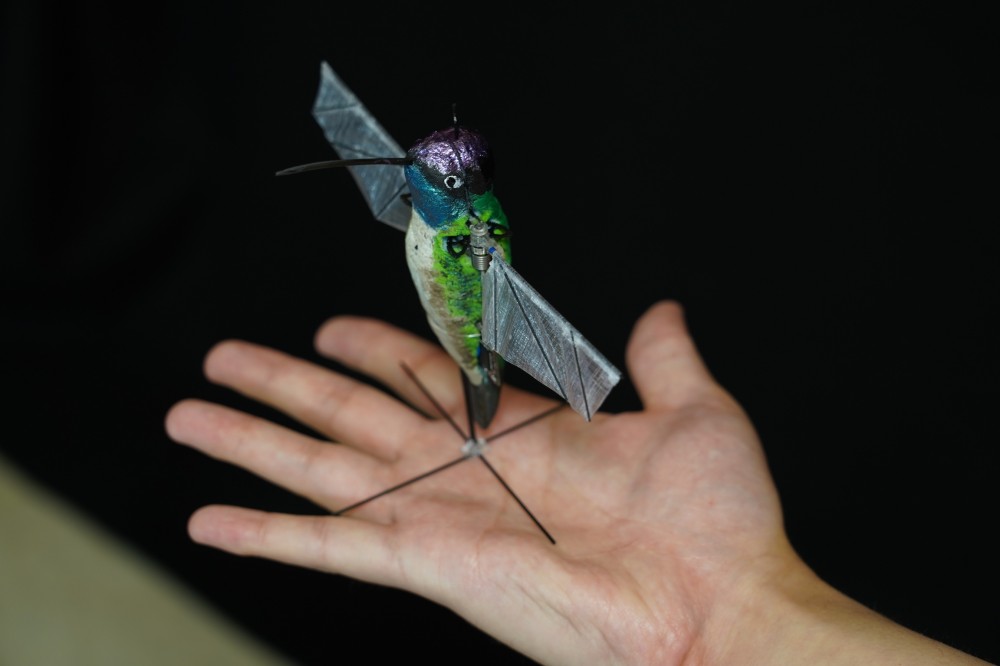
Purdue University的蜂鸟机器人配备了一个灵感来自真正蜂鸟外观的机身盖。
在Purdue University的生物机器人实验室,Xinyan Deng 教授和她的学生们正在对有翼的机器人飞行采取一种非常有意识的生物启发的方法,这种方法产生了我们所见过的最有能力的蜂鸟机器人之一。它与蜂鸟的大小和形状大致相同,研究人员希望它能够像真正的蜂鸟那样进行相同类型的杂技动作。更重要的是,它非常强大,可以利用它的翅膀作为传感器在障碍物周围导航,这意味着它有机会在实验室外发挥作用。
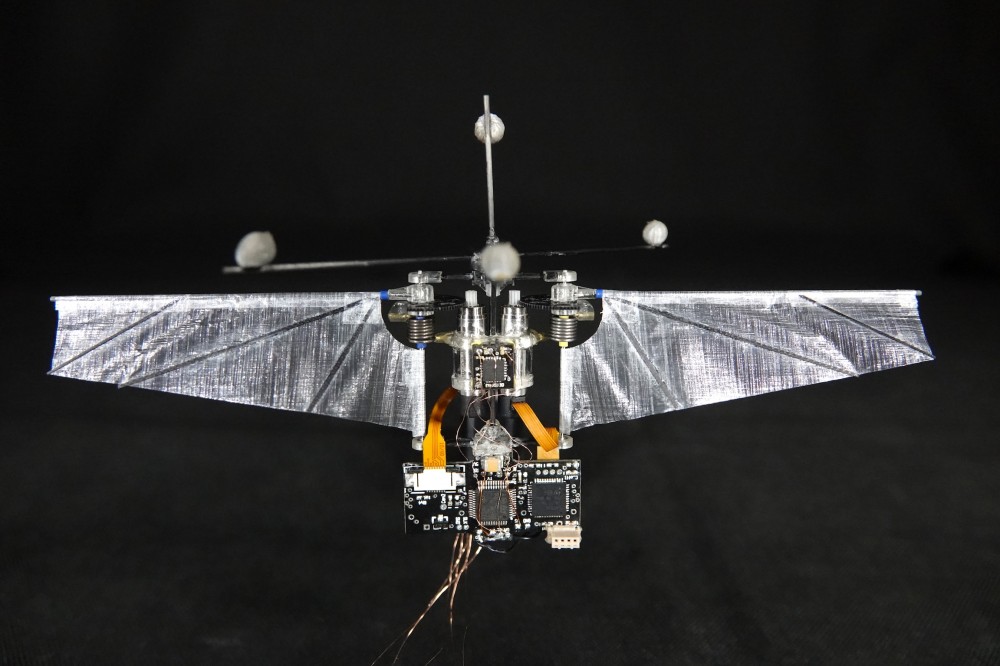
这款机器人既有动力又有控制,而且它使用一个外部定位系统来保持自身在半空中的稳定。如果你仔细观察,你可以在一些慢动作剪辑中看到,机器人的每一个翅膀都是由它自己的马达控制的,它每秒改变方向超过30次。这些分离的翅膀使机器人能够利用与真正的蜂鸟一样的拍打动力,翅膀之间的运动差异很小,从而产生戏剧性的动作。也正是这些直接驱动的马达使得机翼可以用作传感器。发动机能够检测到机翼运动学的变化,比如地面效应增加升力或机翼遇到障碍物时,然后做出相应的反应,包括对机翼损伤的补偿。
Purdue University的研究人员设计了他们的蜂鸟机器人,使其每个机翼都由自己的马达控制,这种方法能让机器人利用与真实蜂鸟相同的拍打动力。
Purdue University的蜂鸟机器人监控流过其电机的电流,以感应接近或接触表面引起的负载变化。
Purdue University的研究人员说,他们已经展示了足够的有效载荷来携带电池和其他传感器。目前,他们可以在没有动作捕捉系统的情况下保持姿态稳定。为了在动作捕捉环境之外实现完全自主,他们需要一个额外的位置反馈传感器,如相机,光流传感器,蓝牙或GPS。他们目前正致力于增加电池以实现无线飞行,并进一步将传统控制与人工智能算法(如强化学习/模仿学习算法)相结合,在机器人上实施,使其成为真正的智能生物启发机器人。
原文地址:http://www.imrobotic.com/news/detail/12433
| 

 发表于 2019-10-8 15:58
发表于 2019-10-8 15:58