|
麻省理工学院的新迷你猎豹机器人是第一个做直体后空翻(backflip.)的四条腿机器人。
对比波士顿动力机器人的空翻各有千秋,更加轻盈。
只有20磅重的四肢动物能弯曲和摆动双腿,使其能够从右侧向上或上下行走。机器人还可以在不平坦的地形上小跑,速度大约是普通人步行速度的两倍。
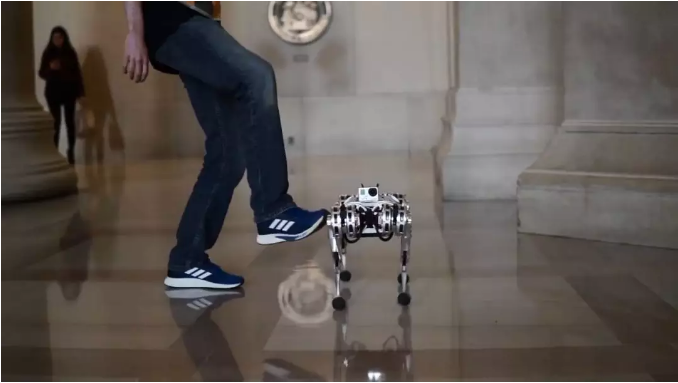
被人故意踢到之后,能够自己翻身爬起来!
戳视频 ↓ ↓ ↓
麻省理工学院的超级迷你猎豹是一种价格低廉、重量轻的四足机器人,能够进行跑步、行走、跳跃和转弯等动作。
超级迷你猎豹的设计遵循麻省理工学院猎豹的许多理念,同时强调使用商用现货组件和低成本快速制造方法。
这台低成本、易于复制的机器足够强大,可以进行动态运动,而且重量轻、价格便宜,可以简化对大型机器人进行安全实验的许多后勤挑战。MIT也希望它的低成本和可复制性使研究人员能够在全球范围内共享可复制硬件上的可实现的控制实现。
去年,MIT的工程师们发明了一种盲人机器人,它可以通过触觉来移动,不需要传感器和摄像机。
研究人员表示,这个算法的真正意义在于如何确定迈出脚步的安全的时间。如果人类闭上眼睛迈出一步,我们就有了一个关于地面可能在哪里的心理模型,并且可以为此做准备。但我们也依赖于触摸地面的感觉,我们在某种程度上也在做同样的事情,通过合并多个(来源)信息来确定过渡时间。
在未来,他们计划向机器人添加摄像头,但他们想要进一步发展它的盲目运动能力。
而猎豹3号机器狗未来还能够执行多种任务,例如检查发电站。此项任务涉及各种地形条件,包括楼梯、路缘石和地面障碍物。
原文链接:http://www.imrobotic.com/news/detail/9261 | 

 发表于 2019-9-24 17:13
发表于 2019-9-24 17:13